Eines Tages beauftragte man mich für eine Ortungssystem-Demo eine Kuh zu entwerfen.
"Martin, wir brauchen Kühe!"
Wie das Endergebnis geworden ist und welchen Problemen ich begegnet bin, möchte ich im heutigen Artikel schildern.
Trivia
- Da ich mit der Demo per se nicht viel zu tun hatte, kann ich auch nicht viel dazu sagen. Was ich weiß ist, dass eine Kuh für ein virtuelles "Bauernhof"-Szenario gebraucht wurde, bei dem der virtuelle Bauer immer seine Schäfchen bzw. in dem Fall Kühe auf der weitläufigen Weide im Blick hat - inklusive all ihrer Vitalzeichen.
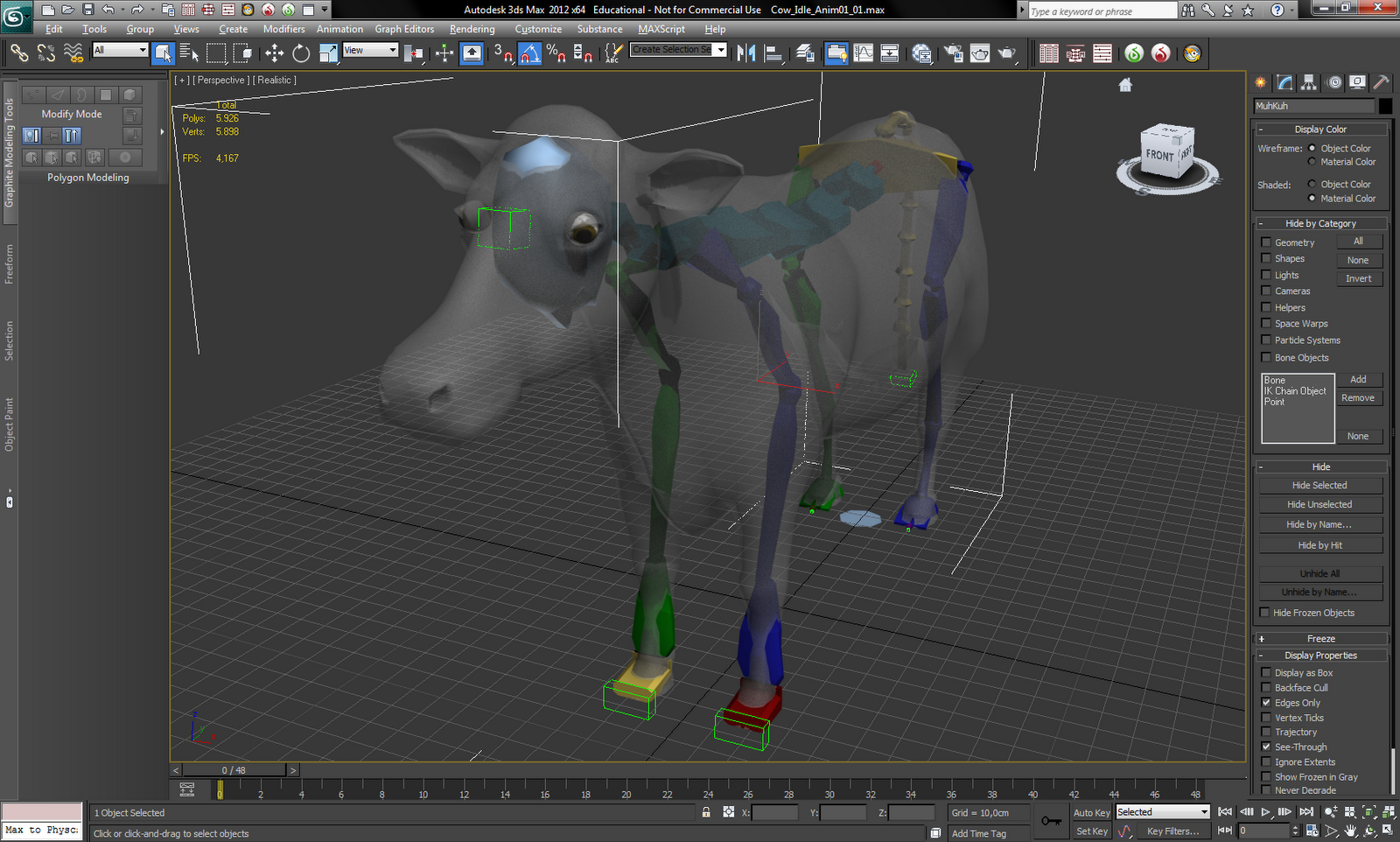
- Da die Demo eine Echtzeitsimulation sein sollte, ging es beim Modellieren auch darum einen optimalen Kompromiss zwischen Polygonanzahl und Detailgrad zu finden. Die auf den Bildern sichtbare Kuh hat in der Summe rund 6.000 Polygone.
- Die Modellierung, Texturierung und Animation habe ich mit 3ds max 2009 gemacht.
- Für einige der Screenshots in diesem Artikel habe ich das brandneue 3ds max 2012 in der "Education"-Version genutzt. Absolute Empfehlung - beste Version seit 3ds max 2009.
- Während der mehrwöchigen Arbeit an dem Modell (meine Wochenarbeitszeit als HiWi ist wegen der lächerlichen 400 Euro Grenze stark beschränkt - danke Vater Staat) wurde ich laufend mit einem herzlichen "Was machen die Kühe?" begrüßt! ^_^'
Modellierung und Texturierung

Da ich vor diesem Modell nur recht technische Modelle bzw. Sach-Modelle erstellt habe, war so ein (relativ komplexes) organisches Modell durchaus eine kleine Herausforderung für mich. Zusätzlich kannte ich Kühe bestenfalls aus dem Fernsehen - als deutscher (Vor-) Stadtmensch laufen einem nicht so häufig Kühe über den Weg. Somit musste ich mir meine Referenzen erstmal zusammensuchen.
Internet sei Dank kommt man aber auch ohne große Mühe an Referenzmaterial in Form von Bildern und Videos.

Leider fiel mir viel zu spät ein, dass es auch Plastik-Modelle von Kühen im Spielzeug- und Modelleisenbahn-Laden gibt.
Gestützt auf unzählige Fotographien und Videos von glücklichen Kühen fing ich somit an zu modellieren und arbeitete mich von der Schnauze zum Hinterteil "vor".

Eine wesentliche Neuerung für mich und eine absolute Wohltat zugleich war mein erstmaliger Einsatz einer
3DConnexion SpaceNavigator 3D-Maus.
Dieses schmucke Stück eines Eingabegerätes vereinfacht die Navigation im virtuellen Raum und macht es derart intuitiv, dass ich heut zu Tage gar nicht mehr ohne ein solches Gerät modellieren möchte.
Die SpaceNavigator-Maus ist zwar eine "Einsteiger"-3D-Maus, doch für die meisten Zwecke absolut ausreichend und deutlich günstiger als eine
SpacePilot Pro, oder
SpaceExplorer. Wer gerne und viel modelliert, dem kann ich eine 3D Maus absolut ans Herz legen. Nutzbar ist sie unter anderem auch mit Google Earth, Photoshop, Autodesk Maya und vielen anderen Programmen.
Die Kuh besitzt nur zwei Texturen: Eine für die Augen, eine für das fleckige Fell. Beide Texturen wurden mit Photoshop erstellt.
Da das Modell für die Echtzeit-Renderumgebung des Fraunhofer IGDs exportiert werden musste, und das Export-PlugIn für 3ds max zum damaligen Zeitpunkt noch arge Probleme mit komplexen UVW-Maps hatte, musste ich etwas tricksen. So habe ich das Fell mittels einer, um 45 Grad auf der Längsachse der Kuh verdrehten, Projektionsplane gemappt. Nicht gerade die eleganteste Lösung, doch eine, welche ein relativ angenehm asymmetrisch-organisches Ergebnis lieferte und dabei den Exporter nicht überforderte.
Die Schnauze, die Hufe, sowie das Euter bekamen "per-vertex" Farben zugeteilt. Dadurch erreichte ich ein schnell gemachtes und trotzdem ansprechendes Ergebnis.
Rigging und Animation
Nachdem das 3D Modell der Kuh fertig modelliert war, musste das nette Rind noch laufen lernen - die Kühe sollten schließlich in der Demo frei über die Weide traben und vom Ortungssystem überwacht werden.
Mir wurde während der Arbeit bewusst, dass ich in Sachen
Rigging und Animation noch viel dazulernen musste. Ich konnte zwar, wie im ersten Teil dieser Artikelserie gesagt, ohne Probleme fertige, organische Modelle anpassen, doch ein komplett jungfräuliches Modell selbst zu riggen und zu animieren, fiel mir doch reichlich schwer.
Um menschenähnliche Gestalten zu riggen und zu animieren enthielt 3ds max 2009 zwar ein gut gemachtes Biped-Skelett, doch für eine Kuh, welche auf vier Beinen läuft, war das so nicht praktikabel. Aus dem Zweibeiner (Biped) musste ein Vierbeiner (Quadruped) inkl. Schwanz gebaut werden.
Nachdem diese Arbeit erledigt war, konnte dann schließlich und endlich das Skelett per Skin-Modifier an das Polygonmesh gekoppelt und die Kuh animiert werden.
Auch hier zeigte sich: Der Umgang mit dem Skin-Modifier muss auch erstmal erlernt werden. Kaum dachte ich alle Vertices an die richtigen Bones mit der entsprechenden Gewichtung gemappt zu haben, schon wurde aus irgend einem Grund ein Polygon am Schwanz der Kuh verändert, wenn die Kuh ihren Kopf bewegte.
Für die Bewegungsabläufe (stehen, sitzen, laufen) nutzte ich als Referenz verschiedene Videoportale, denn auch hier gilt: Normalerweise laufen keine Kühe durch Büroräume.
Ich war sehr überrascht, wie viele Details man doch an so einem unscheinbaren Tier entdeckt, wenn man es über einen längeren Zeitraum "intensiv" studiert. Sehr interessant fand ich die recht steife Vorwärtsbewegung der Hinterläufe (hat meiner Meinung nach Ähnlichkeit mit laufen auf Stelzen).
Ob das Ergebnis überzeugt, könnt ihr euch in folgendem Video ansehen:
Die stehende und sitzende Kuh will ich an dieser Stelle nicht zeigen, da zum Einen die Stehpose recht langweilig und zum Anderen die Sitzpose eine Katastrophe ist! Bei letzterer zeigte sich, wie viel Know-How man doch für ein ansprechendes und wiederverwendbares Rigging-Ergebnis genötigt.
Das war Teil zwei der Artikelserie zu meinen Arbeiten am Fraunhofer IGD.
Im nächsten Teil zeige ich dann mehr "technisches" Material.
Kritik, Kommentare und Anregungen sind sehr willkommen!